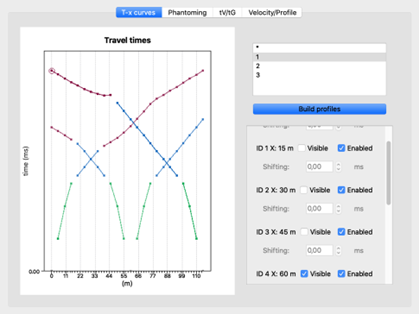
In addition to Seismic Refraction Tomography (SRT) processing, SmartTomo also implements the capability to process the survey using the generalized reciprocal method (GRM). The GRM processing procedure is included in a separate window that is opened by selecting the Refraction (GRM) menu item from the processing menu. The seismic survey processing window presents four tabs.
Tab for Assigning Dromochrons to Layers. Clicking on the first arrival corresponding to the first and last point of the layer will assign the portion of the dromochrone to corresponding layer
This guide presents a procedure for making seismic velocity maps at different depths using seismic tomography data produced by SmartTomo exploiting free and open source tools external to smartTomo.
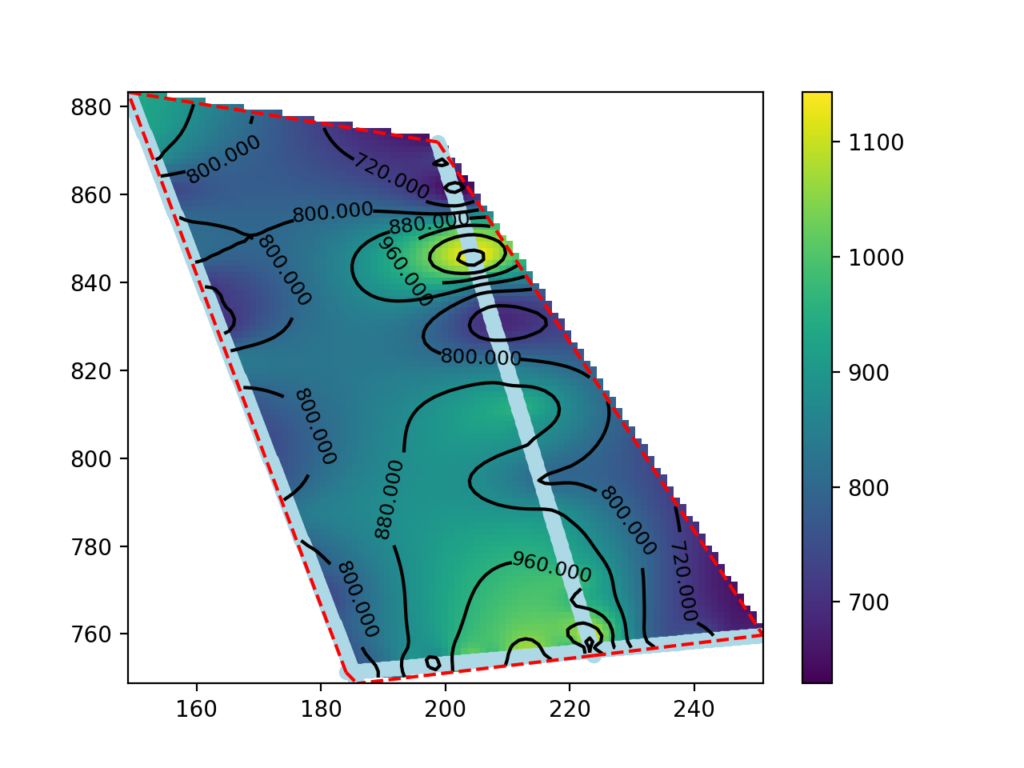
Example of velocity map at the depth of 5.25 meters. In light blue shows the traces of the seismic profiles while in red shows the convex hull enclosing the significant map area.
Three georeferenced seismic profiles exported as a text grid were used for this tutorial. The processing involved the use of Python with the Pandas, Numpy, Scipy and Matplotlib modules.
Download the full code of this tutorial with dataset from here.
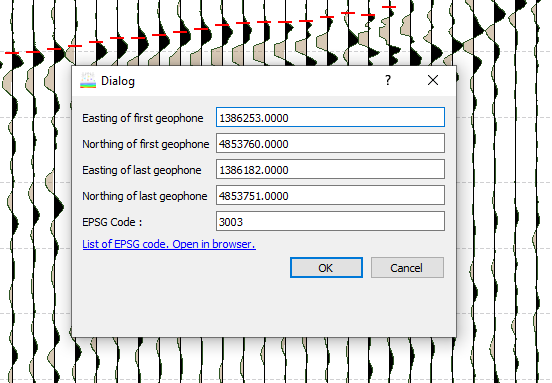
Dialog box for entering the coordinates of the first geophone, the last geophone and the EPSG code to define the reference system used. The code 3003 corresponds to the Gauss-Boaga West Fuse system valid for western Italy.
SmartTomo allows to geo-reference the profiles of seismic refraction tomography in order to visualize them with external tools overlaying for example the DTM.
The dromochrone or travel-time curves are plots in which the arrival times of seismic waves are represented as a function of distance from the source. They find their use in localizing the position of earthquakes, in reflection and refraction seismic surveys. In this post we will address their use in refraction seismic and how they are also useful in traveltime-based refraction seismic tomography.
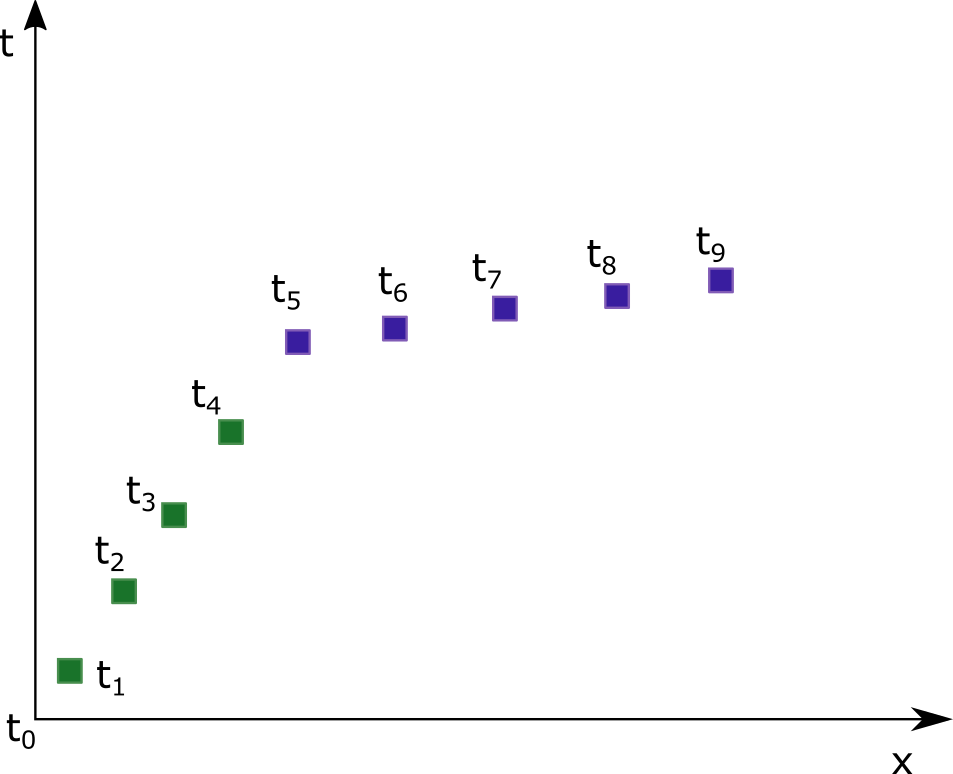
The dromochrone graph is a diagram in which one axis reports the position of the receivers (or the distance from the source) and on the other axis is indicated the time taken to reach the receivers by a given type of seismic wave.
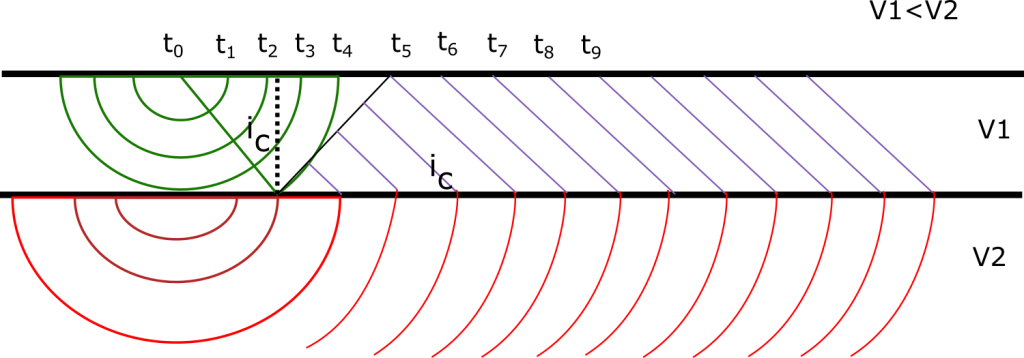
Diagram showing wavefronts propagating from t0 and incident at critical angle ic at the interface between layer 1 and 2; internal refraction occurs and new wavefronts refracted at angle ic towards the surface originate.
The seismic waves when they meet materials characterized by different velocities give origin to refraction and reflection phenomena. When they hit an interface characterized by increasing speed with depth (V2 > V1) with an angle equal to arcsin(V1/V2) called critical angle, the waves travel parallel to the interface and for the principle of Hyugens part of the energy returns to the surface giving rise to the head waves, represented in purple in the diagram above. Measuring the arrival time of the waves at different distances and representing them on a graph we obtain the following plot.
Traveltimes curves from the model above;
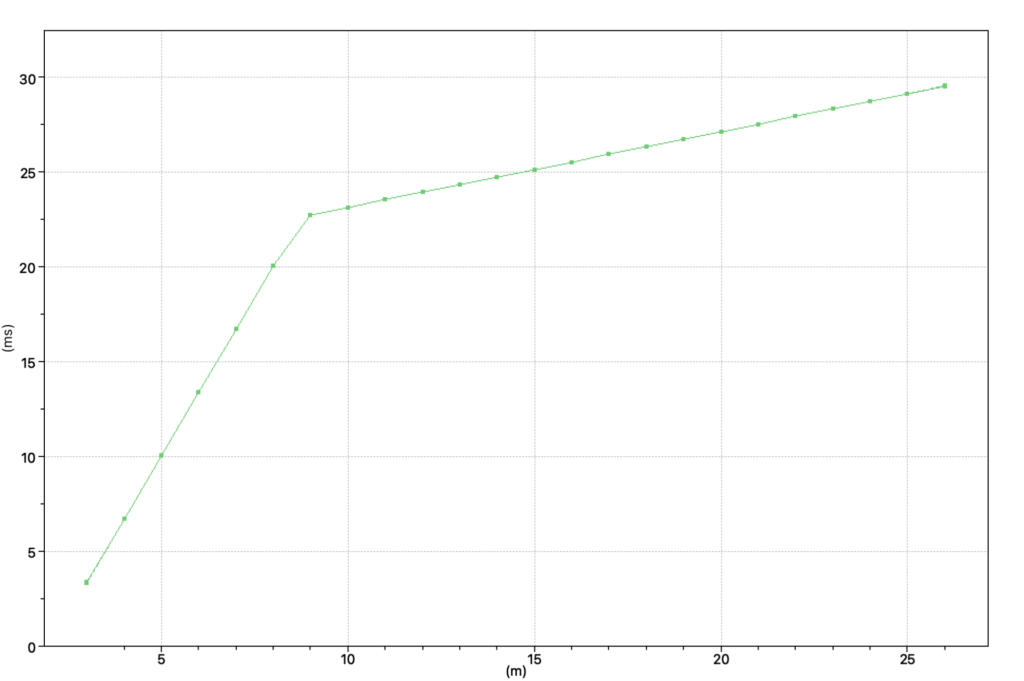
In a model with two uniform horizontal layers where the underlying layer has a velocity V2 > V1 the dromochrone graph is represented by two straight segments. The graph is represented on the plane defined by the distance and time axes so the inverse of the slope of the segment represents the apparent velocity of the crossed layers, i.e.:
(1)
Where X is the position between the receivers or between a receiver and the source while time T is the time required to reach the receivers.
For example, in the image below, the first layer identified by the arrivals between an X equal to 3 and an X equal to 9 corresponding to arrival times of about 3 ms and 23 ms. The speed of the first layer will consequently be
(2)
After the X = 9 coordinate, the dromochrone changes slope and indicates that the waves generating the first arrivals have encountered a faster layer and have undergone refraction at a critical angle.
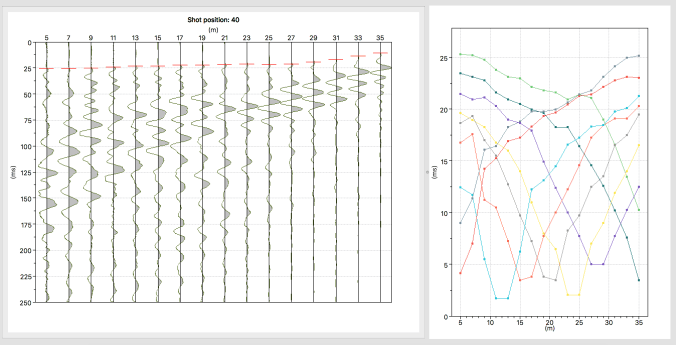
For the interpretation of refraction seismic with the intercept time technique it is necessary to determine the slope of the dromochrone, the crossover point and the intercept time. On the contrary, for tomographic processing only the travel time is important but, of course, refraction must be present, i.e. increasing the distance from the energization position must change the dromochrone slope indicating an increase in velocity. The dromochrone, as in the case of the following image, will be more flattened at greater distances.
Dromochrone of a 2 layers model with V2>V1.
Situations in which the dromochrone breakpoint does not occur, i.e., does not contain a refraction, cannot be interpreted with refraction tomography. The break point may occur with a sharp inflection point or in a softer manner, but must be present. A sharp break may indicate a well-defined interface (e.g., the soil cover placed on the bedrock), while a softer dromochrone break will show a progressive increase in velocity with depth.
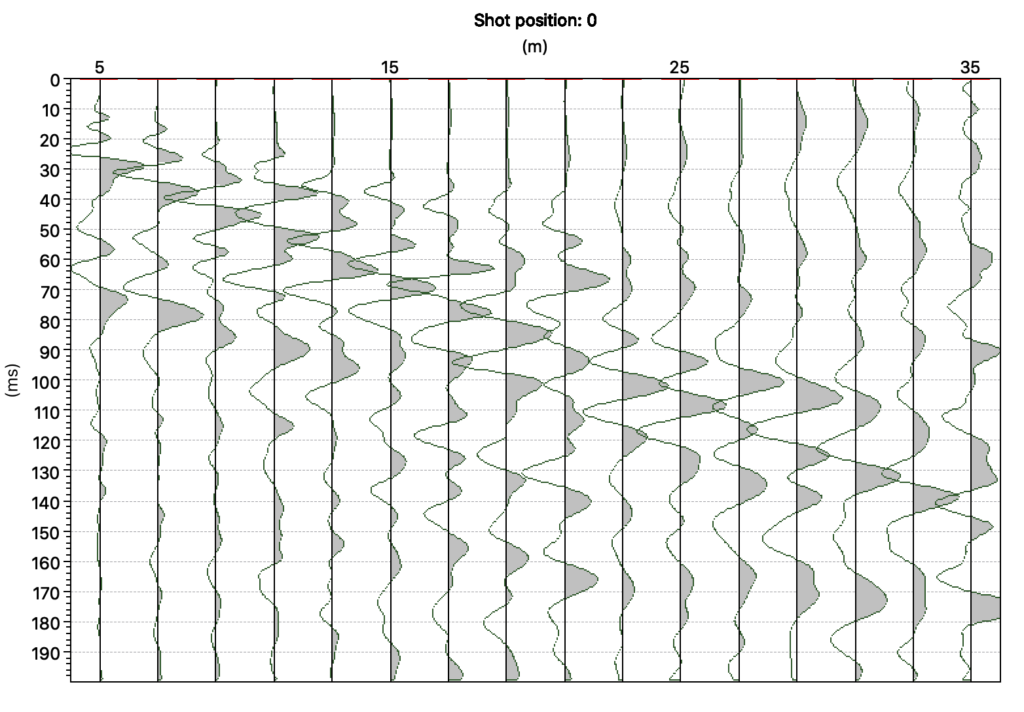
The following image, represents dromocores that do not show the correct bending (break point), indicating instead an increase in arrival times with increasing distance. This dromochrone arrangement does not fit the interpretation with the refraction technique. Using SmartTomo the resulting profile would often be just a row of cells whose velocity would try to optimize arrival times through direct waves only.
This situation should be identified already in the field during the survey to understand if it could be due to acquisition problems (e.g., poorly evident first arrivals) or to actual characteristics of the site and therefore the need to perform different type of surveys.
Traveltimes curves that show no refraction and may leads to a wrong tomographic profile
Seismic tomography allows the reconstruction of an image of the subsoil distribution of seismic wave velocity and its anomalies with high resolving power. In detail, refraction seismic survey is an indirect, active seismic survey that uses refracted waves generated by contrasts of waves velocity to reconstruct subsurface characteristics. The velocity of seismic waves depends on the density and elastic properties of the material crossed, i.e., properties attributable to the lithological characteristics of the substrate investigated. The direction of propagation of the waves in depth follows Snell’s law and at each interface there are phenomena of refraction, reflection and diffraction. In refraction surveys, as the name implies, only refracted waves will be considered. Refraction seismic tomography allows to obtain a picture of the velocity distribution in the subsurface highlighting the continuous changes in velocity rather than a layered model typical of refraction surveys ( Intercept, delaytime, plus minus, GRM).
The setting of data acquisition to perform the tomographic processing is similar to the one used for the refraction seismic surveys, for example applying the G.R.M. method (Palmer, 1980).
Example of a scheme for the recording of a refraction tomographic seismic survey with four external and three internal shots.
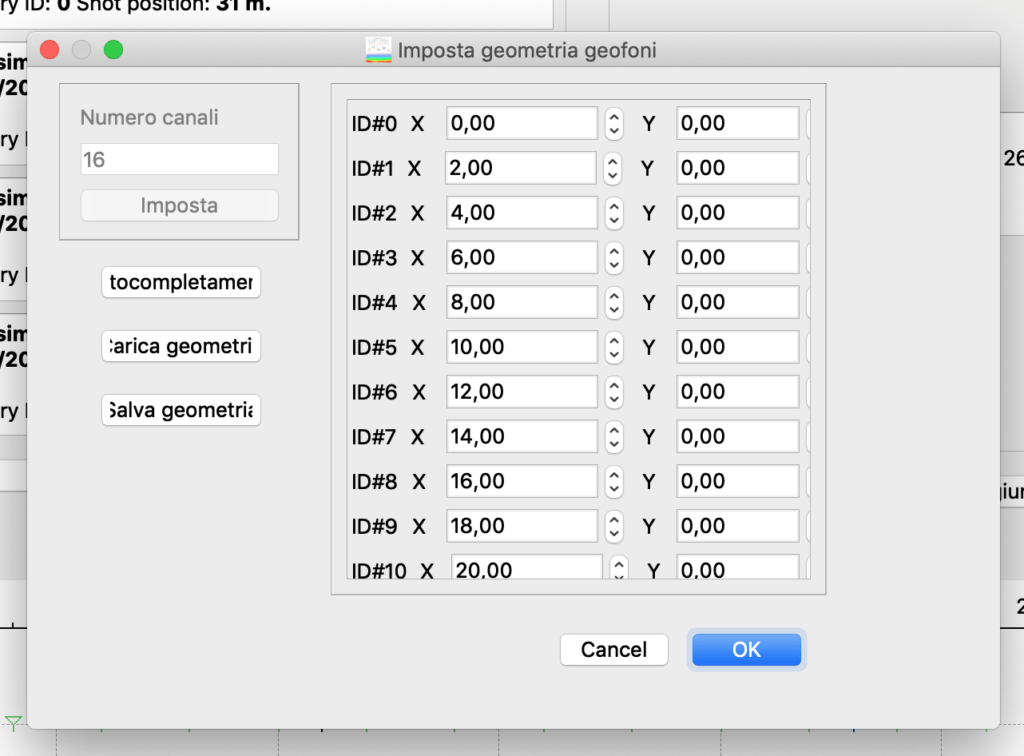
The geophones must be placed in line, normally with a constant spacing that depends on the horizontal resolution to be obtained, while the length of the line determines the maximum depth of investigation that can be achieved.
The energizations are placed in line with the geophones line both internally and externally. If to acquire data in a refraction survey can be sufficient, at the limit, only 5 energizations, 4 external (2 per side) and one central, for seismic tomography it is necessary to perform more shots inside the line. We suggest to energize at least every 4-5 geophones.
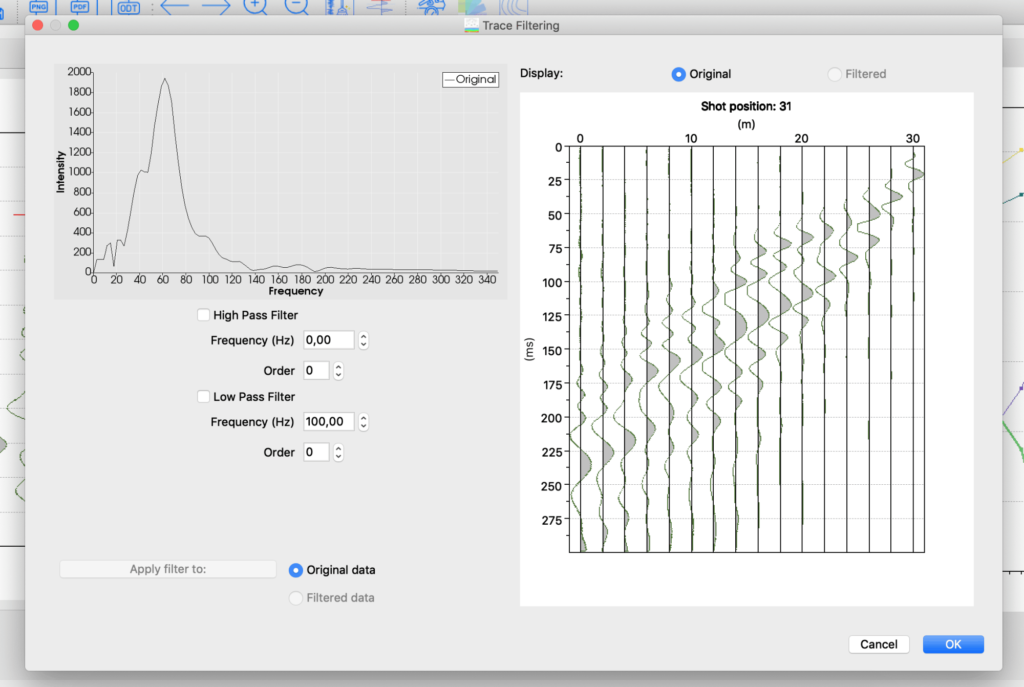
The signal of a refraction test, performed using a hammer as energization typically has a frequency between 50 and 100Hz. The sampling frequency must therefore be higher than 200Hz. Since you want to have a good time resolution of the signal you can set as acquisition parameter a sampling rate of at least 5000Hz.
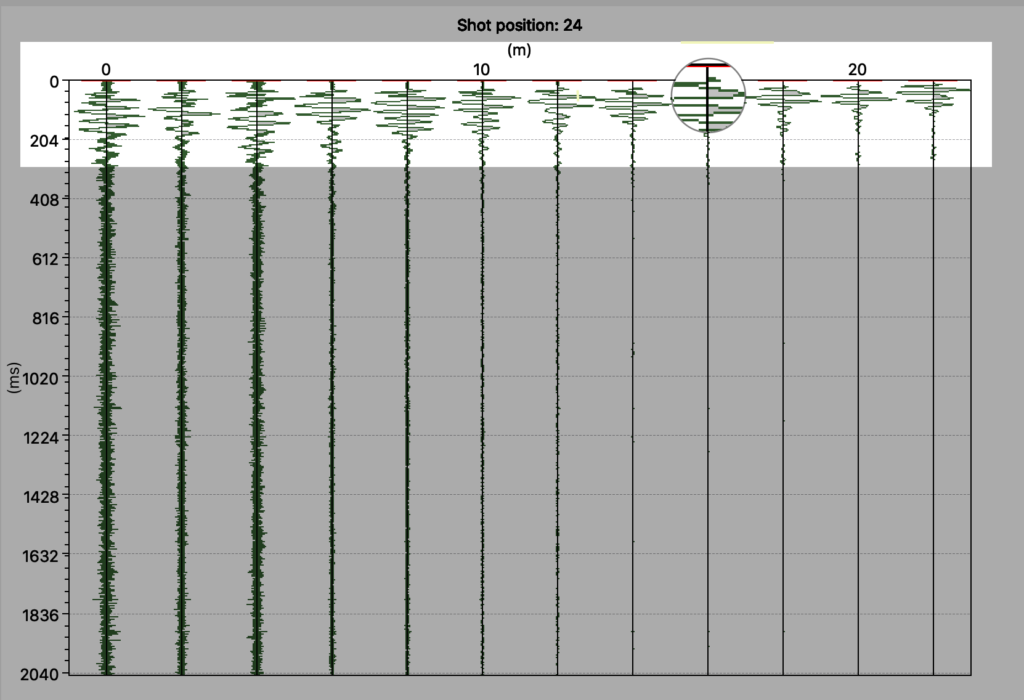
Example of acquisition of a signal that is too long in time. The signal is flattened at the top of the view.
Example of acquisition suitable for refraction analysis. The first arrivals are not squeezed in the upper part and the signal has a sampling frequency that does not generate alias
Refraction seismic tomography uses the time of first arrivals to calculate the profile in the same way as refraction survey processing using methods such as GRM, time delay, or intercept. The recording of the signal must be long enough to detect the arrivals on all geophones. Usually for 50 meters long seisimic line it is enough to record for a time interval of 500ms. The needed recording time may vary depending on the subsoil conditions we are investigating and the type of wave we are measuring. P waves will be almost twice as fast as S waves in many stratigraphics contexts. For example, with the average speed of 1000 m/s, the first break takes 50 ms to reach a receiver located 50 meters from the source.
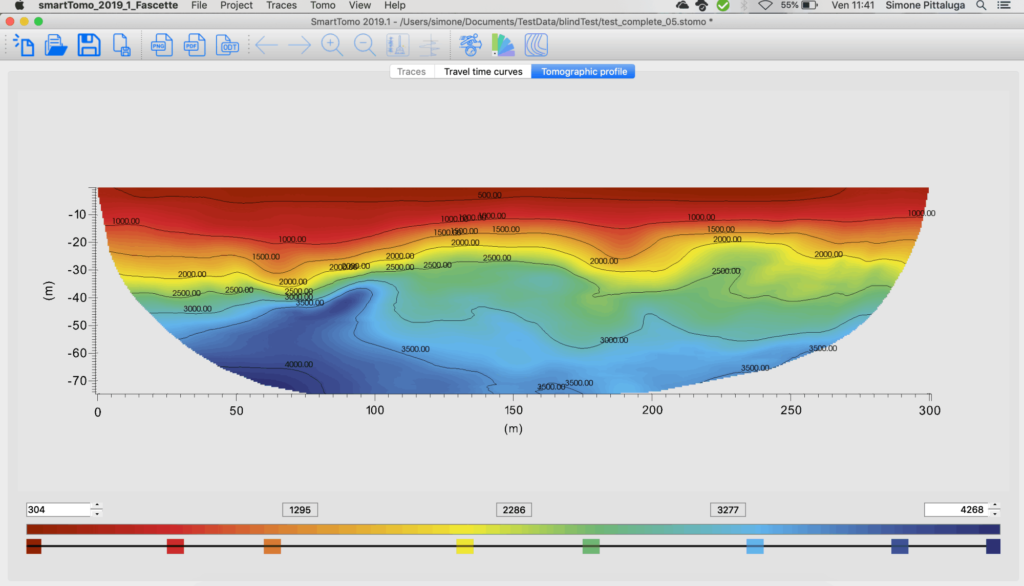
This guide introduces the fundamental steps to process seismic refraction tomography with smartTomo software. The demo version is distributed with a pre-loaded dataset. The characteristics of the dataset are described in this article (Demo version). At startup the following screen appears reminding you that this is a demo version and it shows the list of files that will be loaded.
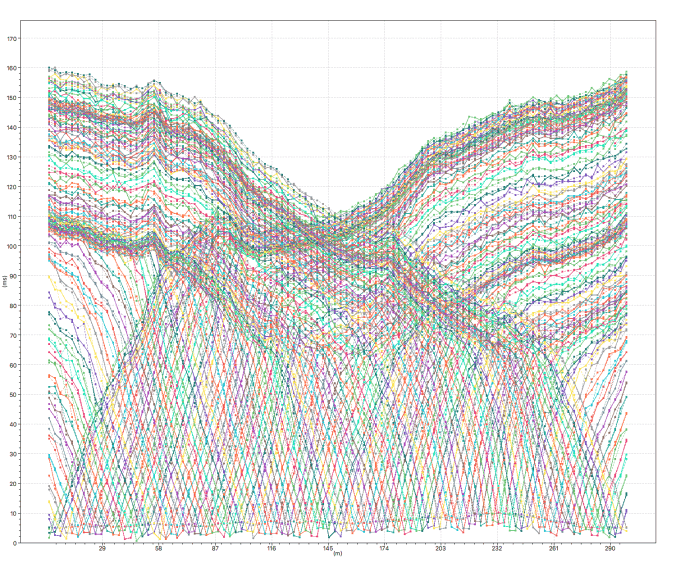
Tomographic profile computed using SmartTomo software for seismic processingFiltering signalSmartTomo dialog to set receivers geometrySmartTomo traveltimes plot
smartTomo
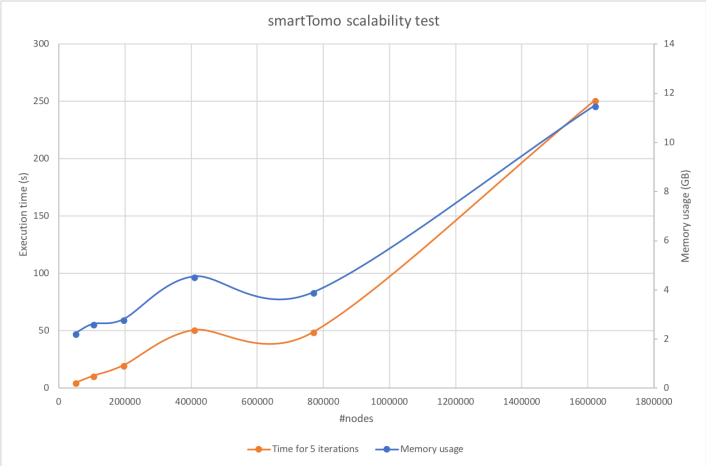
2018.0 has been tested to verify the speed of execution as the number
of nodes increases. A synthetic dataset of 12 shots recorded with 96
channels was used for the test.
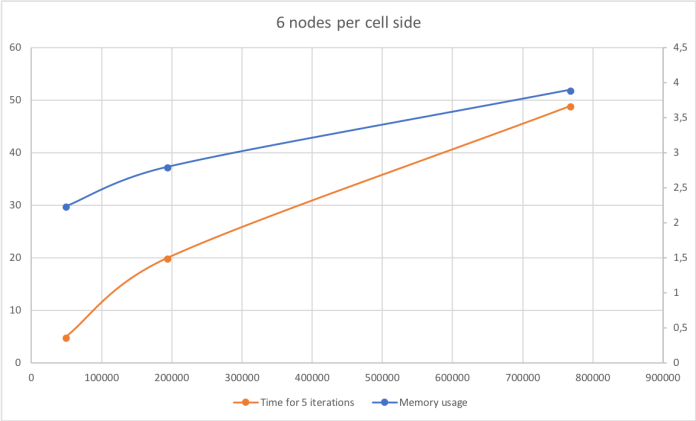
The test was conducted by decreasing the size of the cells and, for each dimension, using both 6 and 11 nodes per side. The test has been performed on a MacbookPro configured as follows: Processor name: Intel Core i5 Processor speed: 2.9 GHz Number of processors: 1 Total number of Core: 2 Cache L2 (for Core): 256 KB Cache L3: 3 MB Memory: 16 GB
smartTomo 2018.0 has shown to have a linear behavior with respect to the increase in the number of nodes both for the execution time and for the memory used.
The graph on the left shows oscillations due to the number of nodes per
cell side. Increasing the number of nodes per side improves the
definition of seismic rays but complicates some calculation steps.
Concluding, for a section 212 meters long, 25 meters deep with a resolution of 0.5 meters and 11 nodes per cell side (407541 nodes) it takes 51 seconds for 5 iterations and 4.55GB of ram, obtaining a maximum error on time of first break less than 5%.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept All”, you consent to the use of ALL the cookies. However, you may visit "Cookie Settings" to provide a controlled consent.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.